こんてんつ
連続体力学を学ぶ上で重要なコーシーの応力テンソルを導出する。一般的な書物は3次元からの誘導が殆どである。ここでは理解しやすい2次元問題からの導出を実施し、その後3次元問題でも導出する。
コーシーの応力テンソルの意味
次の様な任意形状の物体を考えた時、コーシーの応力テンソルが分かれば、任意の
面に作用する点
を通る表面力ベクトル
が分かる(
)という代物のことである。

2次元問題
下記の様な点近傍の微小三角形を考える。この三角形それぞれの面(辺)に現れる表面力ベクトルを考える。それらは次のようになる。

を単位法線ベクトルとした面(辺)に現れる表面力ベクトルを
を単位法線ベクトルとした面(辺)に現れる表面力ベクトルを
を単位法線ベクトルとした面(辺)に現れる表面力ベクトルを
とする。ここで、
- ベクトル
に垂直なの辺の長さを
に垂直な辺の長さを
に垂直な辺の長さを
とする。三角形に作用する力のつり合い式より、
を得る。ところで、、
であるから、
となる。ここで、次の図の様に
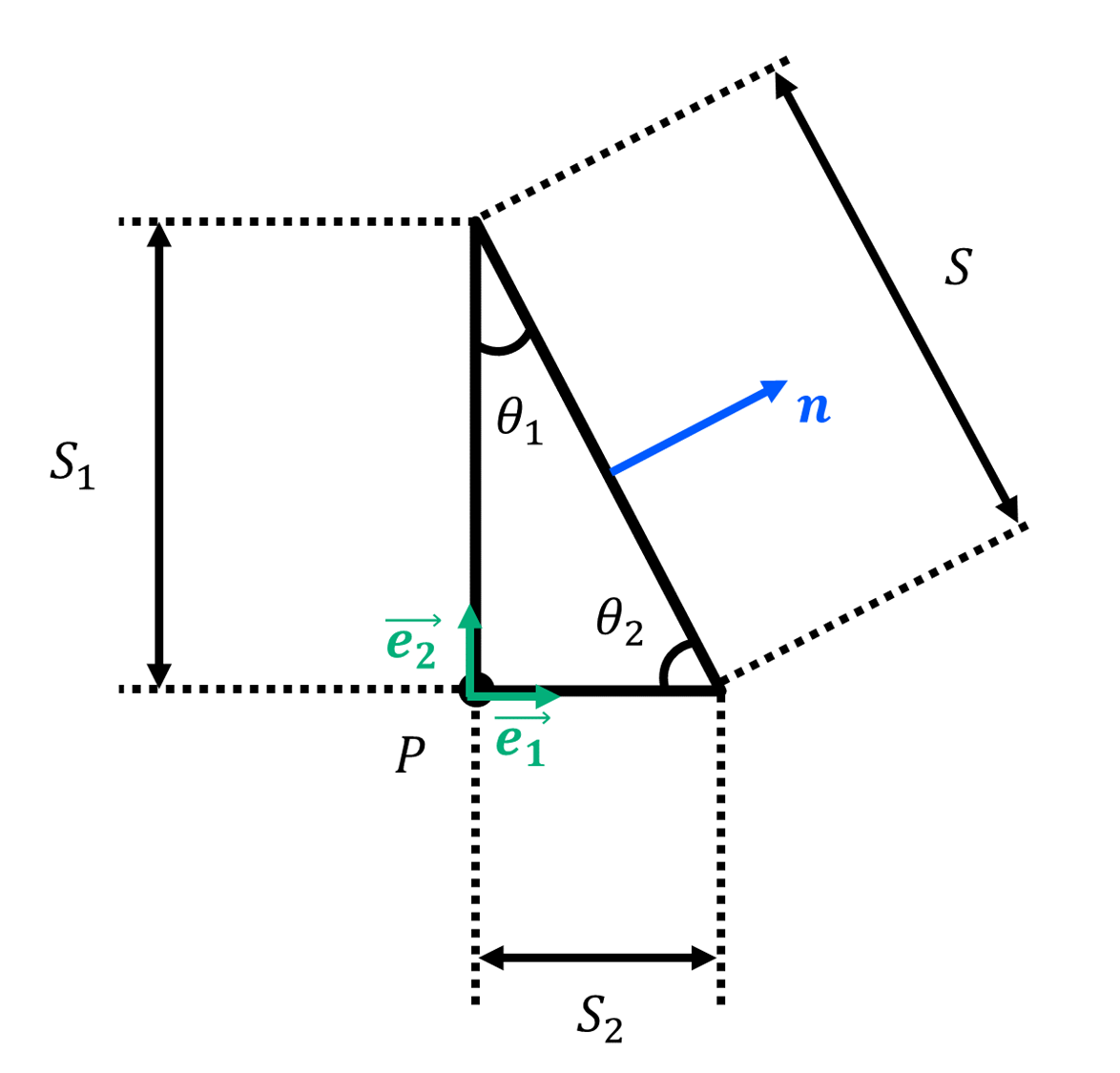
であるが、ベクトル内積の公式(正射影の公式)より
なので、
となる。よってつり合いの式は、
となる。で除せば、
となる。この式は、点を通る
、
軸に垂直な表面ベクトルを調べておけば、任意の法線ベクトル
を持つ面の表面力ベクトル
を求めることが出来るということを表す。ここで法線ベクトル
を
、
の成分で表し、
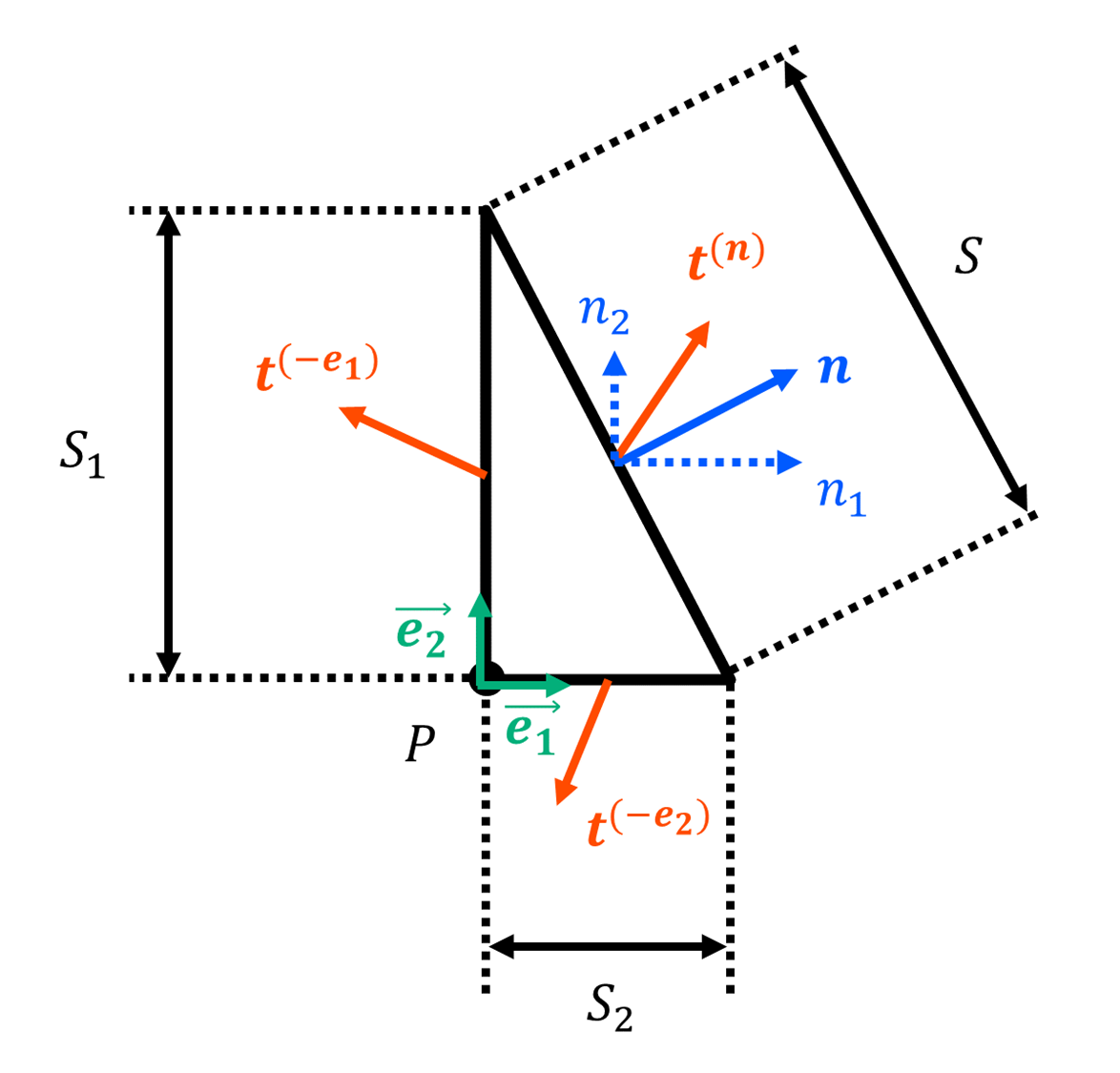
より、
を得る。さて、最後に、すべての表面力ベクトルを、
の成分で表し、つり合いの式を書き換えると、
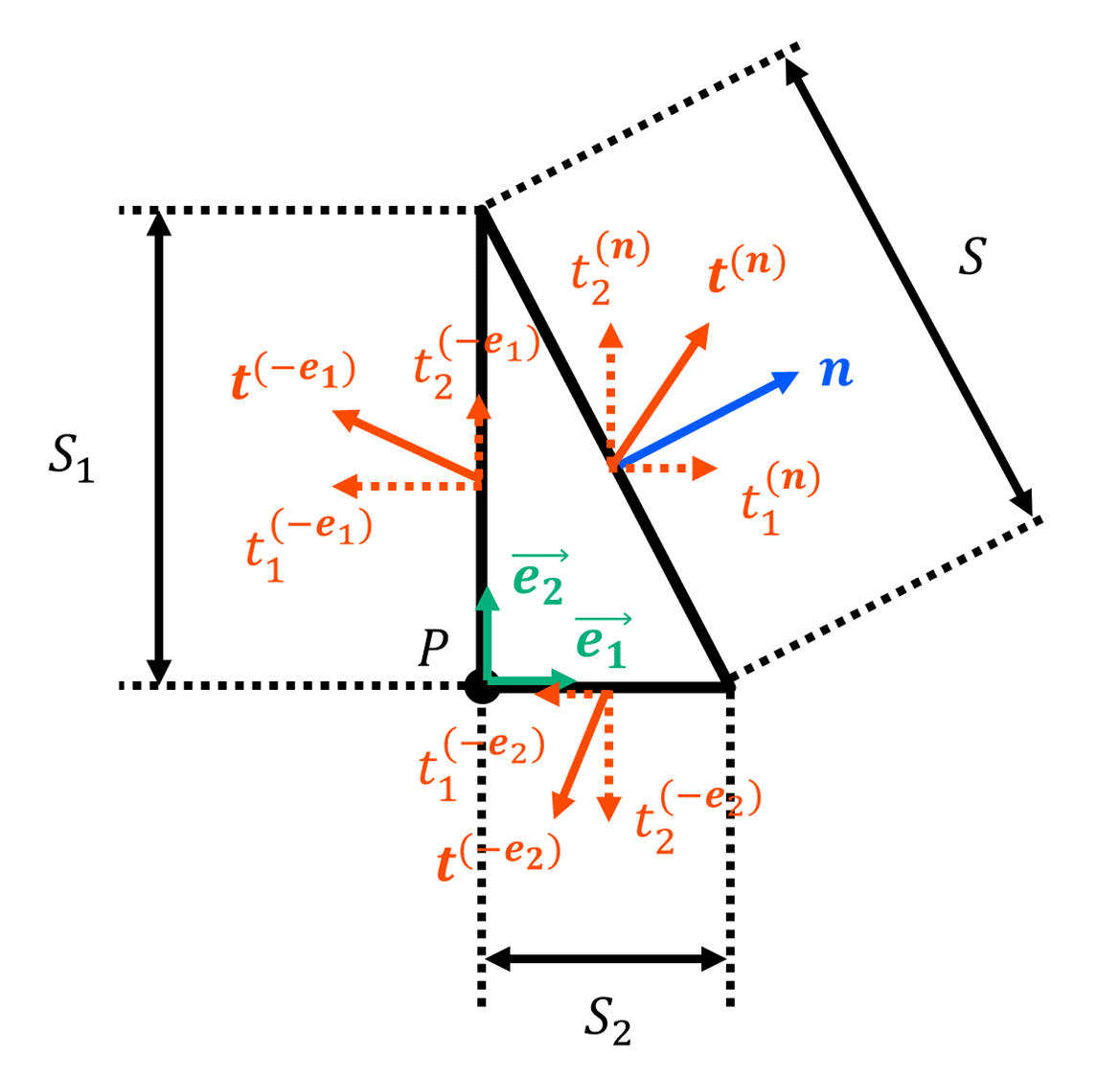
の様になる。この式に現れている行列こそコーシーの応力テンソルである。の様にコーシーの応力テンソル
が分かれば、任意の
面に作用する点
を通る表面力ベクトル
が分かる。
3次元問題
下記の様な点近傍の微小四面体を考える。この四面体それぞれの面に現れる表面力ベクトルを考える。それらは次のようになる。

を単位法線ベクトルとした面に現れる表面力ベクトルを
とする。ここで、
- ベクトル
に垂直な面の面積を
とする。三角形に作用する力のつり合い式より、
を得る。ところで、、
、
であるから、
となる。ここで、正射影の公式より、
となるので、つり合いの式は、
となる。で除せば、
となる。この式は、点を通る
、
、
軸に垂直な表面ベクトルを調べておけば、任意の法線ベクトル
を持つ面の表面力ベクトル
を求めることが出来るということを表す。ここで法線ベクトル
を
、
、
の成分で表し、
より、
を得る。さて、最後に、すべての表面力ベクトルを、
、
の成分で表し、つり合いの式を書き換えると、
の様になる。この式に現れている行列こそコーシーの応力テンソルである。の様にコーシーの応力テンソル
が分かれば、任意の
面に作用する点
を通る表面力ベクトル
が分かる。